 ケース
ケース
モビリティ機能開発
想定ユースケース例 2022.1.12


ロボットそのものの機能開発
1
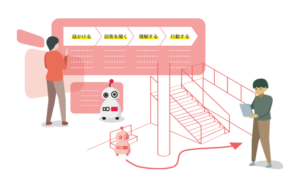
サービス概要検討 サービス導入の目的やサービス概要を決め提案し、契約を取り付ける

従来なら
現場調査を行ったうえで、
顧客のイメージの見当をつけ、提案を行う。
顧客の抱くサービスイメージとサービスを
実施する場所に対する考えを引き出し、
サービスの大枠を決める
コモングラウンドなら
セキュリティエリアなどを除いた建物の
3D情報を顧客から提供され、
場のイメージを共有しながら
ディスカッションを行える
2
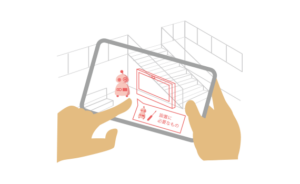
サービス設計・机上検証 サービスシナリオ詳細化後、システム要件やリアル環境設計を行い、検証を行う。
従来なら
ロボットがいつどのようにサービスを提供するのか
シーン別に設計し、イメージやプロトタイプを
実際に作って検証を行う
コモングラウンドなら
リアルな場所を想定した仮想空間を用いながら、
シームレスにサービスの設計と検証を行える
3
実装、社内テスト 定義したシステム要件に従って、新規機能の開発やその統合を行う。その後TEST
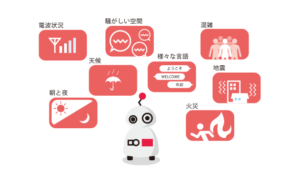
従来なら
新規に開発した機能を実装し、動きを確かめる。
現場で起こりえるがテストのしようがないものは
想像で補う
コモングラウンドなら
様々な状況を事前にシミュレートして、
ロボットやモビリティをテストできる
4
設営・施工 機器の設置を行い、調整を行う
従来なら
設営・施工時にモレなどを起こさないよう、
設置手順書などを入念に作成し、
作業者同士で共有をして、設置を行う
コモングラウンドなら
設営・施工時に、場所ごとの
注意点などを記録、共有できる
5
現場TEST リハーサルや現場への周知を行い、最終調整を行う
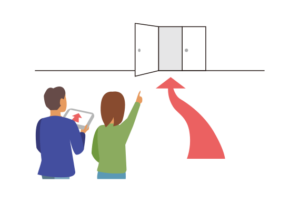
従来なら
書類ベースの運用マニュアル・
保守マニュアルを作成し、運用を伝える。
伝わりにくい部分は写真などを駆使する
コモングラウンドなら
実環境に重ね合わせて、
オペレーターや保守員への現場特有の
注意点をレクチャできる
6
本番 日々のサービスを開始し、運用・維持を行う
従来なら
故障などが起きたときに、
発見したときの状況などをもとに
保守員やサービス開発会社に問合わせをする
コモングラウンドなら
不具合が起きたときの位置だけでなく、
その時の状況を含めて、
コモングラウンドに記録が残り参照できる
